O Arduino Nano gerencia a exibição no Display de quatro linhas, o acionamento do buzzer e o ajuste e leitura do RTC. More...
#include <Wire.h>#include <LiquidCrystal_I2C.h>#include <RTClib.h>#include "frame.h"Classes | |
| struct | ProtocolMessage |
| Representa a decodificação de uma mensagem recebida. More... | |
| struct | Display |
| Representa o estado de uma linha do display LCD. More... | |
Macros | |
Códigos de Mensagens do Protocolo. | |
Constantes usadas na comunicação serial com a TV-Box. Cada constante representa um tipo de mensagem disparada pelo master (TV-Box). | |
| #define | PING 100 |
| #define | TIME 200 |
| #define | LECTURE_NAME 300 |
| #define | SPEAKER 400 |
| #define | ATTENDEE 500 |
| #define | SUCCESS 600 |
| #define | FAIL 601 |
| #define | SETTIME 700 |
| #define | GETTIME 701 |
Macros de controle dos dispositivos. | |
Constantes usadas para I2C e controles adicionais. Essas constantes são relacionadas aos endereços I2C e demais ajustes sobre os dispositivos externos. | |
| #define | BUZZER 2 |
| #define | COL 20 |
| #define | ROW 4 |
| #define | ADDRESS 0x27 |
| #define | DISPLAY_UPDATE_DELAY 500 |
| #define | LOOP_DELAY 10 |
| #define | KEEP_AT_ZERO 1 |
| #define | KEEP_AT_LAST 1 |
Functions | |
| LiquidCrystal_I2C | lcd (ADDRESS, COL, ROW) |
| void | copiaN (char dest[], int sizeDest, char origem[], int sizeOrigem, int start) |
| Copia um trecho de uma string de origem para um buffer de destino, ajustando posição inicial e preenchendo com espaços em branco, se necessário. | |
| void | atualizaDisplay (int lines) |
| Atualiza o conteúdo exibido no display LCD linha a linha. | |
| void | parseMessage () |
| Interpreta a mensagem recebida pela serial USB e atualiza a estrutura global netMessage. | |
| void | setup () |
| Configuração inicial do sistema Arduino. | |
| void | loop () |
| Loop principal do firmware. | |
Variables | |
| ProtocolMessage | netMessage |
| Mantém uma única mensagem recebida. | |
| Display | dispArray [ROW] |
| Informações para as quatro linhas do Display. | |
| const char * | VERSION = "1.0" |
| Versão do firmware. | |
| char | strReply [MAX_STRING+1] |
| char | auxStr [MAX_STRING+1] |
| unsigned long | uptime |
| Tempo em que o Arduino está ligado em milissegundos. | |
| RTC_DS3231 | rtc |
| DateTime | now |
| SerialProtocol | usbProto |
| Classe que implementa a transmissão e recepção de quadros pela serial sobre USB. | |
Detailed Description
O Arduino Nano gerencia a exibição no Display de quatro linhas, o acionamento do buzzer e o ajuste e leitura do RTC.
O Arduino Nano comunica-se por via serial sobre USB com a TV-Box. O protocolo de comunicação está na classe SerialProtocol. São mensagens de quadro encapsuladas com os caracteres '<' e '>'. No interior do quadro é possível usar o caracter de escape para: '<', '>' e '\'. A semântica das mensagens é específica para a aplicação IFSPresente. Há nove tipos de mensagens emitidas pela TV-Box.
- <100|0|0> → PING
- <200|TEXTO|TIMEOUT> → TIME (Linha 0, para sala, data e hora)
- <300|TEXTO|TIMEOUT> → LECTURE_NAME (Linha 1, para nome da palestra)
- <400|TEXTO|TIMEOUT> → SPEAKER (Linha 2, para nome do palestrante)
- <500|TEXTO|TIEMOUT> → ATTENDEE (Linha 3, aponta participante registrado
- <600|0|0> → SUCCESS (Beep de sucesso no registro)
- <601|0|0> → FAIL (Beep de falha no registro)
- <700|YYYY:MM:DD:HH:MM:SS|0> → SETTIME (Define a hora do RTC)
- <701|0|0> → GETTIME (Recebe a hora do RTC, além da temperatura)
O Arduino responde com três tipos de mensagens.
- <001|uptime em milissegundos|versão de firmware> → Resposta ao ping
- <003|YYYY:MM:DD:HH:MM:SS|temperatura> → Resposta ao gettime
- <002|OK|> → Resposta aos demais comandos
Outras aplicações podem definir outros modelos de mensagens nos quadros do protocolo.
Macro Definition Documentation
◆ ADDRESS
| #define ADDRESS 0x27 |
Serve para definir o endereço do display.
◆ ATTENDEE
| #define ATTENDEE 500 |
Linha 3: estudante que aponta sua presença.
◆ BUZZER
| #define BUZZER 2 |
Pino digital ligado ao buzzer.
◆ COL
| #define COL 20 |
Serve para definir o numero de colunas do display utilizado.
◆ DISPLAY_UPDATE_DELAY
| #define DISPLAY_UPDATE_DELAY 500 |
Tempo em milissegundos em que um texto é exibido numa linha do display antes de sofrer scroll.
◆ FAIL
| #define FAIL 601 |
Beep de falha no registro, seja por leitor biométrico de digital ou por senha no teclado numérico.
◆ GETTIME
| #define GETTIME 701 |
Comando para solicitar data/hora do RTC ligado ao Arduino, além da temperatura.
◆ KEEP_AT_LAST
| #define KEEP_AT_LAST 1 |
Quando um texto é exibido numa linha do display, deve ficar um tempo a mais antes de reiniciar o scroll.
◆ KEEP_AT_ZERO
| #define KEEP_AT_ZERO 1 |
Quando um texto é exibido numa linha do display, deve ficar um tempo a mais antes de iniciar o scroll.
◆ LECTURE_NAME
| #define LECTURE_NAME 300 |
Linha 1: nome da palestra.
◆ LOOP_DELAY
| #define LOOP_DELAY 10 |
Tempo em que o loop principal do código do Arduino dorme à espera de uma mensagem.
◆ PING
| #define PING 100 |
Obtém o timestamp do uptime e a versão do firmware.
◆ ROW
| #define ROW 4 |
Serve para definir o numero de linhas do display utilizado.
◆ SETTIME
| #define SETTIME 700 |
Comando para ajustar data/hora do RTC ligado ao Arduino.
◆ SPEAKER
| #define SPEAKER 400 |
Linha 2: nome do professor responsável pela aula em curso.
◆ SUCCESS
| #define SUCCESS 600 |
Beep de sucesso no registro, seja por leitor biométrico de digital ou por senha no teclado numérico.
◆ TIME
| #define TIME 200 |
Linha 0: sala, data e hora.
Function Documentation
◆ atualizaDisplay()
| void atualizaDisplay | ( | int | lines | ) |
Atualiza o conteúdo exibido no display LCD linha a linha.
Esta função gerencia a exibição de mensagens no display, considerando:
- Tempo mínimo entre atualizações (usando
millis()eDISPLAY_UPDATE_DELAY). - Mensagens temporárias (TTL): quando expiram, voltam para a mensagem padrão.
- Rolagem horizontal (scroll): caso a mensagem seja maior que o número de colunas (
COL), realiza deslocamento progressivo, mantendo o início por alguns ciclos (KEEP_AT_ZERO) antes de avançar.
O comportamento difere conforme a mensagem ativa:
- Se
dispArray[i].TTLexpirou → mostradefaultMessagecom rolagem. - Caso contrário → mostra
messagecom rolagem.
- Parameters
-
[in] lines Índice da linha a ser atualizada: -1→ atualiza todas as linhas, para efeito de rolagem horizontal, então faz a cada DISPLAY_UPDATE_DELAY milissegundos.0..ROW-1→ atualiza apenas a linha especificada e faz automaticamente independentemente de DISPLAY_UPDATE_DELAY ter expirado, alcançando boa responsividade.
- Note
- Usa
copiaN()para preencher o buffer de exibição (toPrint). - Usa o estado da máquina (
usbProto.machState) para evitar atualizações durante recepção de dados. - O cursor do LCD é posicionado no início de cada linha (
lcd.setCursor(0,i)).
- Usa
Regras de rolagem
- Quando
startPosition == 0, mantém a mensagem parada porKEEP_AT_ZEROciclos. - Depois, incrementa
startPositionaté o limite calculado, com espera emKEEP_AT_LASTno final.
◆ copiaN()
| void copiaN | ( | char | dest[], |
| int | sizeDest, | ||
| char | origem[], | ||
| int | sizeOrigem, | ||
| int | start | ||
| ) |
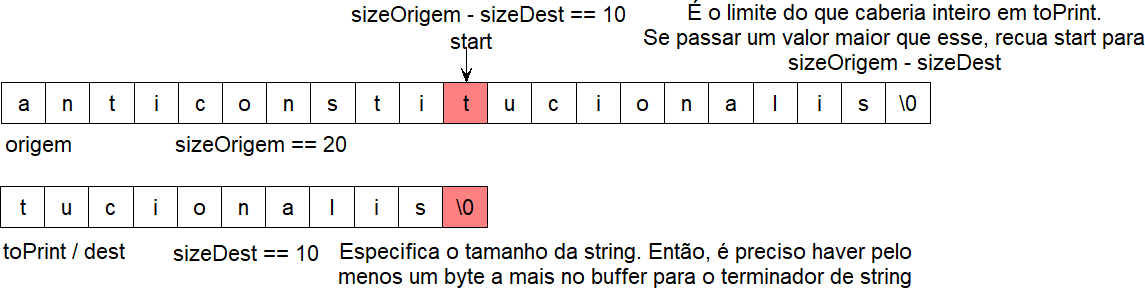
Copia um trecho de uma string de origem para um buffer de destino, ajustando posição inicial e preenchendo com espaços em branco, se necessário.
Esta função garante que o conteúdo copiado caiba exatamente no tamanho do display (ou outro destino), ajustando o índice inicial (start) caso:
- A string de origem seja menor ou igual ao destino → começa da posição zero.
- A string de origem seja maior que o destino, mas o ponto inicial da cópia desejada ultrapasse os limites → recua o início para preencher completamente o destino.
Após a cópia, o restante do buffer de destino é preenchido com espaços em branco, e o finalizador ‘’\0'` é adicionado ao fim.
- Parameters
-
[out] dest Buffer de destino (receberá a string copiada). [in] sizeDest Tamanho da string que ficará em dest, número de caracteres visíveis no display. O bufferdestprecisa ter pelo menos (sizeDest+1) bytes.[in] origem String de origem. [in] sizeOrigem Tamanho da string de origem. [in] start Posição inicial na string de origem a partir da qual a cópia deve começar (pode ser ajustada internamente pelo algoritmo).
- Note
- Usa
min(sizeDest, sizeOrigem)para calcular o máximo de caracteres a copiar. O destino é sempre terminado em ‘’\0'`.
Exemplo de Funcionamento
◆ loop()
| void loop | ( | ) |
Loop principal do firmware.
O loop() executa continuamente o ciclo de atualização do display, recepção de mensagens da TV-Box e execução dos comandos recebidos.
O comportamento segue o protocolo definido:
- PING (100): responde com uptime em ms e versão do firmware.
- TIME (200): atualiza linha 0 (sala, data, hora).
- LECTURE_NAME (300): atualiza linha 1 (nome da palestra).
- SPEAKER (400): atualiza linha 2 (nome do professor).
- ATTENDEE (500): atualiza linha 3 (participante) e força atualização imediata.
- SUCCESS (600): feedback sonoro curto (registro aceito, pode ser usuário/senha correto ou leitura correta de impressão digital).
- FAIL (601): feedback sonoro duplo (registro rejeitado).
- SETTIME (700): Define a data e hora do RTC do Arduino.
- GETTIME (701): Obtém a data/hora do RTC, além da temperatura em graus Celcius.
Estrutura do loop
- Atualiza o display (
atualizaDisplay(-1)). - Recebe frame via
usbProto.receiveFrame(). - Se um frame válido foi recebido (
machState == RECEIVED):- Chama
parseMessage()para decodificar. - Executa ação conforme
netMessage.code. - Responde sempre
"002|OK"após comandos de atualização. - Atualiza mensagens em
dispArray(conteúdo, tamanho, TTL, rolagem). - Gera sinais sonoros quando uma digital for lida ou usuário/senha do teclado.
- Reinicia estado da máquina (
machState = START). - Reinicia o ciclo (
goto CONTINUE) sem esperar odelay.
- Chama
- Se nada foi recebido → aguarda
LOOP_DELAYantes do próximo ciclo.
- Note
- O
goto CONTINUEgarante responsividade, reiniciando o ciclo imediatamente após processar uma mensagem (sem aguardarLOOP_DELAY). - O uso de
atualizaDisplay(3)no casoATTENDEEdeixa a linha 3 mais responsiva a eventos de digitação no teclado. - A comunicação usa
usbProto, que mantém a decodificação de um frame recebido.
- O
- See also
- atualizaDisplay
- parseMessage
◆ parseMessage()
| void parseMessage | ( | ) |
Interpreta a mensagem recebida pela serial USB e atualiza a estrutura global netMessage.
Esta função:
- Remove os marcadores de acentuação gráfica da string recebida (
usbProto.receivedChars). - Usa
strtokpara separar os campos da mensagem, assumindo o caractere|como delimitador. - Converte o primeiro campo para um código numérico (
netMessage.code). - Copia o segundo campo como texto da mensagem (
netMessage.message). - Converte o terceiro campo em milissegundos para o tempo de vida (
netMessage.TTL).
- Note
- A função não recebe parâmetros nem retorna valor. Atua diretamente sobre as variáveis globais
usbProtoenetMessage.
◆ setup()
| void setup | ( | ) |
Configuração inicial do sistema Arduino.
Esta função é chamada automaticamente pelo framework Arduino logo após o reset ou inicialização da placa. Ela é chamada uma única vez.
Inicializações realizadas:
- Define o pino do buzzer (
BUZZER) como saída. - Inicializa o display LCD (
lcd.init()). - Configura contraste e backlight do display (mas não tem efeito no display que usamos).
- Desativa autoscroll e cursor piscante.
- Limpa a tela do display (
lcd.clear()). - Configura a taxa de comunicação serial (
usbProto.setBaudRate(9600)). - Ajusta os tamanhos das mensagens padrão em
dispArray.
- Note
- Esta função não recebe parâmetros e não retorna valor. É executada uma única vez antes de
loop().
Variable Documentation
◆ dispArray
Informações para as quatro linhas do Display.
Contém as quatro linhas do display LCD. Cada posição tem:
- Mensagem atual (
message) - Mensagem padrão (
defaultMessage) - Texto a imprimir (
toPrint) - Tamanho da mensagem (ajustado em
setup()) - Tamanho da mensagem padrão (ajustado em
setup()) - Posição inicial da string a partir da onde imprime no display
- Tempo de vida (TTL) de impressão da mensagem
Inicialmente preenchido com mensagens padrão do sistema:
- Linha 0 → "IFSPresente"
- Linha 1 → "Local Disponivel"
- Linha 2 → "Sem reserva de palestrante"
- Linha 3 → "Aguardando Registro"
◆ VERSION
| char * VERSION = "1.0" |
Versão do firmware.
- Note
- É retornado junto com o serviço ping.